Jayson Piquero1*, Edwin Sybingco1, Alvin Chua2, Marc Say1, Clarisse Crespo1, Reginald Rivera1, Ma. Antonette Roque1, and Leonard Ambata1 1De La Salle University. Department of Electronics and Communications Engineering
2De La Salle University. Department of Mechanical Engineering
Download Citation:
|
Download PDF
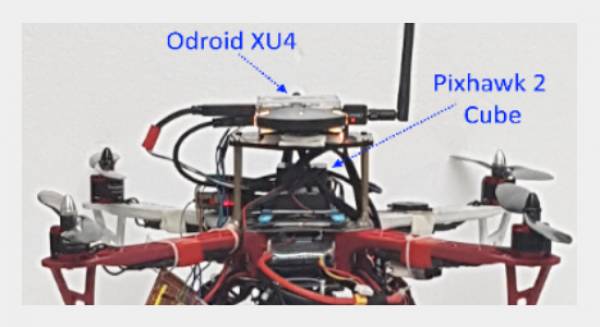
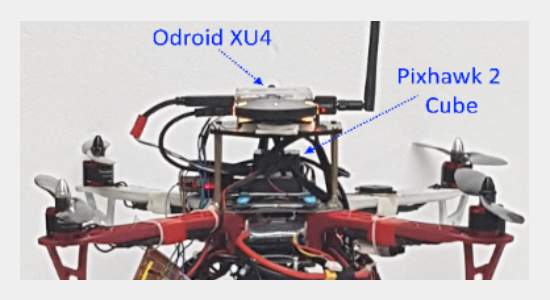
This paper presents a novel implementation of an autonomous human following done using local context algorithm. The vision system consists of a drone equipped with a companion computer and camera. Through the vision system, drones can behave according to its desired application. In this study, the Pixhawk 2 Cube flight controller of the drone is connected to Odroid XU4, the companion computer. The OpenMV camera is connected to the Odroid XU4 and streams image bytes whereas the Odroid XU4 performs image processing to detect the human through local context. The Odroid XU4 controls the drone by sending commands to the flight controller based on detected objects. Drone following is implemented by detecting humans from the image stream provided by OpenMV and maintaining the detected human on the center of the image and within a specified distance through drone movements. The results show the single movements right, left, forward, and backward yielded low steady-state errors with settling time of about 3 to 4 seconds. ABSTRACT
Keywords:
quadrotor, vision, human tracking, local context
Share this article with your colleagues
REFERENCES
A. Rabie, C. Lang, M. Hanheide, M. Castrillon-Santana, and G. Sagerer, "Automatic Initialization for Facial Analysis in Interactive Robotics", Proceedings of the 6th international conference on Computer vision systems, 2018. https://doi.org/10.1007/978-3-540-79547-6_50
M. Santana, H. Kruppa, and B. Schiele, "Fast and Robust Face Finding via Local Context", 2003. https://doi.org/10.1007/978-0-387-88777-7_3
P. Viola and M. Jones, "Rapid Object Detection using a Boosted Cascade of Simple Features", Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, 2001. https://doi.org/10.1109/CVPR.2001.990517
ARTICLE INFORMATION
Received:
2019-04-01
Accepted:
2019-06-06
Available Online:
2021-07-01
Jayson. P., Edwin. S., Alvin. C., Marc. S., Clarisse. C.,, Reginald. R., Ma. A.R., Leonard. A. (2021) A Novel Implementation of an Autonomous Human Following Drone using Local Context. Int. j. autom. smart technol. https://doi.org/10.5875/ausmt.v11i1.2147
Cite this article:
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.