Shashi Bhushan Sankhyan1* and Gunchita Kaur Wadhwa2
1Department of Mechanical Engineering, Pillai HOC College of Engineering and Technology, University of Mumbai, Rasayani, 410207, Maharashtra, India 2Department of Mechanical Engineering, ASET, Amity University Mumbai, Panvel, 410206, Maharashtra, India
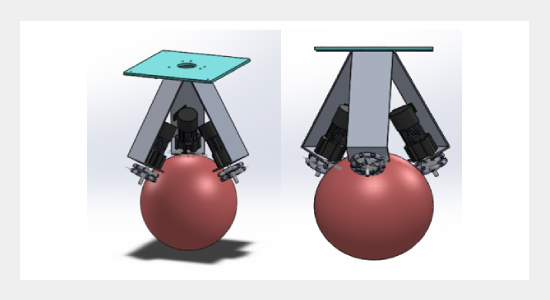
Ball balancing robot (BBL) forms a dynamically stable system mounted on a ball, which is in point contact with the ground surface. An omni-directional system for the BBL with maneuvering ability in the horizontal plane is attained as compared to two-wheeled robots, which can only move forward or backward. The stability of the BBL is defined by its capability to retain the upright position under all circumstances. Available literature includes the use of several single controllers to stabilize the BBL. This study performs a comparison of two popular controllers for stability analysis of the BBL, which included two model-based controllers, i.e., Proportional Integral Derivative (PID) and Linear Quadratic Regulator (LQR). A 2D planar model is considered for mathematical modeling at the two vertical planes as well as the horizontal plane. Furthermore, the steady state equations are derived using the Euler-Lagrangian method. PID and LQR controllers are used to provide stability to the BBL using a mathematical toolkit in MATLAB. The results from MATLAB are used to study the differences between PID and LQR for stability of the BBL based on time needed to balance the robot. The settling time for the PID and LQR controllers was 0.79 seconds and 2.25 seconds, respectively. The results illustrate that the PID controller stabilized the BBL in upright position efficiently and more swiftly as compared to the LQR controller.
[1] Golem Krang, M. Stilman, J. Olson,and W. Gloss, “Dynamically stable humanoid robot for mobile manipulation” in Proc. IEEE Int’l Conf. on Robotics and Automation, 2010,pp. 3304–3309. https://doi.org/10.1109/ROBOT.2010.5509593
[2] Suomela, Tomi Ylikorpi and Jussi “Ball-shaped Robots”. [book auth.] Houxiang Zhang. Climbing & Walking Robots, Towards New Applications, Vienna, Austria: Itech Education and Publishing, 2007, pp. 546. https://doi.org/10.5772/5083
[4] H. G. Nguyen, J. Morrell, K. Mullens, A. Burmeister,S. Miles, N. Farrington, K. Thomas, and D. Gage “Segway robotic mobility platform” in SPIE Proc.5609: Mobile Robots XVII,2004. https://doi.org/10.1117/12.571750
[6] P. Deegan, B. Thibodeau, and R.Grupen “Designing a self-stabilizing robot for dynamic mobile manipulation” Robotics: Science and Systems - Workshop on Manipulation for Human Environments, 2006. https://doi.org/10.21236/ADA459932
[7] P. Deegan, R. Grupen, A. Hanson, E.Horrell, S. Ou,E. Riseman, S. Sen, B. Thibodeau, A. Williams, and D. Xie “Mobile manipulators for assisted living in residential settings” Autonomous Robots, Special Issue on Socially Assistive Robotics,2008, pp. 24(2):179–192. https://doi.org/10.1007/s10514-007-9061-8
[8] T.B.Lauwers, G.A. Kantor,R.L.Hollis “A Dynamically Stable Single -Wheeled Mobile Robot with Inverse Mouse Ball Drive” 2006.
[9] M. Neunert, P. Fankhauser, S. Leutenegger, C. Pradalier, F. Colas,and R. Siegwart “Ballbot Rezero: Mechanical design, system modeling and control”, 2013, IEEE Robotics and Automation Magazine.
[10] M.Kumagai, T.Ochiai “Development of a Robot Balancing on a Ball”,2008.
[11] C.-W. Liao, C.-C.Tsai, Y. Y. Li, and C.-K. Chan “Dynamic modeling and sliding-mode control of a ball robot with inverse mouse-ball drive” Aug. SICE Annual Conference, pp. 2951 – 2955, 2008.
[12] Vijay Ramnath, Swarnim Raizada, “Kugel Balance: Ballbots-the future of personal transport?" 2013, p.3.
[13] Tom Lauwers, George Kantor and Ralph Hollis “One is enough”, 12th International Symposium on Robotics Research, 2005.
[14] M. Kumagai and T. Ochiai “Development of a robot balanced on a ball- first report, implementation of the robot and basic control”, Journal of Robotics and Mechatronics, vol. 22, no. 3, pp. 348–355, 2010. https://doi.org/10.20965/jrm.2010.p0348
[15] Havasi., L. “ERROSphere: an equilibrator robot”, Int’l Conf. on Control and Automation, pp. 971-976,2005.
[16] Ochiai., M. Kumaga and T. “Development of a robot balanced on a ball — Application of passive motion to transport” Int. Conf. Robotics and Automation ICRA ’09., pp. 4106-4111, 2009. https://doi.org/10.1109/ROBOT.2009.5152324
[18] Ochiai, Masaaki Kumagaind Takaya “Development of a Robot Balanced on a ball-First report, Implementation of the robot and basic control”, Journal of robotics and Mechatronics, 2010. https://doi.org/10.20965/jrm.2010.p0348
[19] J.Fong, S.Uppill “Design and Build a Ballbot” Adelaide, Australia : s.n., 2009.
[21] R.Hollis. Ballbots. Scientific American,. [Online] October 23, 2006. [Cited: December 23, 2014.]
[22] Xin Yeoh Jia, “Balancing Ballbot”.Universiti Teknologi Malaysia 2012, p. 99.
ARTICLE INFORMATION
Received: 2023-03-15 Revised: 2023-06-01 Accepted: 2023-06-05 Available Online: 2023-06-05
Cite this article:
Sankhyan, S. B., and Wadhwa, G. K. (2023) A Comparison Between PID and LQR Controllers for Stabilization of a Ball Balancing Robot. Int. j. autom. smart technol. https://doi.org/10.5875/ausmt.v13i1.2448
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.