Chi-Yung Yena,b*, Fuh-Liang Wenc, and Minsun Ouyanga a Department of Engineering and System Science, National Tsing-Hua University, Hsinchu 300, Taiwan, R.O.C.
b Department of Electrical Engineering, National United University, Miaoli 360, Taiwan, R.O.C.
c Department of Mechanical Engineering, St. John’s and St. Mary’s Institute of Technology, Taipei 251, Taiwan, R.O.C.
Download Citation:
|
Download PDF
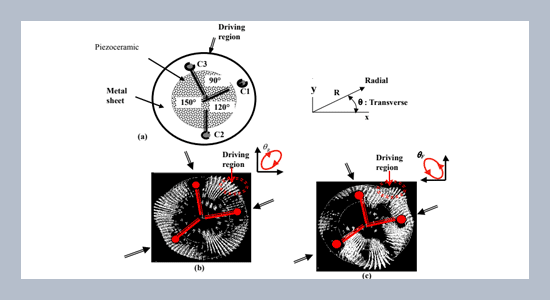
An approach of controller design based on fuzzy set and sliding-mode control theory for positioning purpose of a thin-disc edge-driving ultrasonic motor (USM) is developed in this study. A commercially available thin-disc buzzer used as a novel actuating component of ultrasonic motor with simple structure has been demonstrated its cost effectiveness and advantage in flexible mechanism design of a stator and rotor separately according to the necessary of applications. The driving mechanism associated with the non-linear phenomena such as dead-zone and hysteresis behaviors were studied too. Through system identification technique, the approximated transfer function of ultrasonic motor was obtained for controller design using fuzzy sliding-mode (FSMC). It has been successfully applied to position tracking to prove the excellent robust performance in noise rejection.ABSTRACT
Keywords:
ultrasonic motor; non-linear; dead-zone; hysteresis; fuzzy sliding-mode; robust.
Share this article with your colleagues
[1] Wen, F. L., Yen, C. Y., and Ouyang, M. 2003. Thin-disk piezoceramic ultrasonic motor. Part I: design and performance evaluation. Ultrasonics, 41: 437-450.REFERENCES
[2] Yen, C. Y., Wen F. L., and Ouyang, M. S.2003. Thin-disc piezoceramic ultrasonic motor. Part II: system construction and control. Ultrasonics, 41: 451-463.
[3] Ouyang, M. S. and Wen, F. L. 2002. Thin-disc Piezoelectric Actuating Ultrasonic Motor. USA Patent: 6 489 705.
[4] Song, G., Chaudhry V, and Batur, C. 2003. Precision tracking control of shape memory alloy actuators using neural networks and a sliding-mode based robust controller. Smart Material and Structure, 12: 223-231.
[5] Ge, P. and Jouaneh, M. 1995. Modelinghysteresis in piezoceramic actuators. Precision Engineering, 17: 211-21.
[6] Richard, T. and Detournay E. 2000. Stick–slip motion in a friction oscillator with normal and tangential mode coupling. Friction, Adhesion, Lubrification :671-678.
[7] Choi, S. B., Kim, H. K., Lim, S. C., and Park, Y. P. 2001. Position tracking control of an optical pick-up device using piezoceramic actuator. Mechatronics, 11: 691-705.
[8] Yu, Y., Naganathan, N., and Dukipati, R. 2002. Preisach modeling of hysteresis for piezoceramic actuator system. Mechanism and Machine Theory, 37: 49-59.
[9] Yu, Y., Xiao, Z., Naganathan, N. G., anDukipati, R. V. 2002. Dynamic preisach modelling of hysteresis for the piezoceramic actuator system. Mechanism and Machine Theory, 37: 75-89.
[10] Young, K. D. 1986. A variable structuremodel following control design for robotics applications. IEEE International Conference Robotics Automation, San Francisco, , U.S.A.: 540-543.
[11] Slotine, J. E. and Sastry, S. S. 1986. Tracking control of nonlinear system using sliding surface with application to robot manipulator,. International Journal Control, 38: 465-492.
[12] Utkin, V. 1993. Sliding mode controldesign principles and applications to electric drives. IEEE Transaction Industrial Electrons, 40: 23-36.
[13] Buja, G. S., Menis, R., and Valla, M. I. 1993. Variable structure control of an SRM drive. IEEE Transaction Industrial Electrons , 40: 56-63.
[14] Hashimoto, H., Yamamoto, H., Yana gisava, S., and Harashima, H. Brushless servomotor control using variable structure approach. IEEE Industrial Application Society Annu. Meet. Pt.1: 72-79.
[15] Senjyu, T., Yokoda, S., and Uezato, K. 1998. Position control of ultrasonic motors using sliding mode control with multiple control inputs. IEEE Ultrasonics Symposium, 597-602.
[16] Itkis, U. 1976. Control Systems of Variable Structure. John Wiely. New York.
[17] Kaiyu, Z., Hongye, S., Jian, C., and Keqin, Z. 2000. Globally stable robust tracking of uncertain systems via fuzzy integral sliding mode control. IEEE Proceeding of the 3rdWorld Congress on Intelligent Control and Automation, R. China: 1827-1831.
[18] Lin, F. J. and Chiu, S. L. 1998. Adaptive fuzzy sliding-mode controller for PM synchronous servo motor drives. IEE Proc. Control Theory Application, 145: 63-72.
ARTICLE INFORMATION
Accepted:
2004-09-02
Available Online:
2004-12-02
Yen, C.-Y., Wen, F.-L., Ouyang, M. 2004. Nonlinear positioning compensator of a novel Thin-Disc ultrasonic motor using fuzzy Sliding-Mode control, International Journal of Applied Science and Engineering, 2, 257–276. https://doi.org/10.6703/IJASE.2004.2(3).257
Cite this article: