Li-Chun Liao*, Jun-Rong Luo Department of Computer Science and Information Engineering, Chaoyang University of Technology, Taichung City, Taiwan
Download Citation:
|
Download PDF
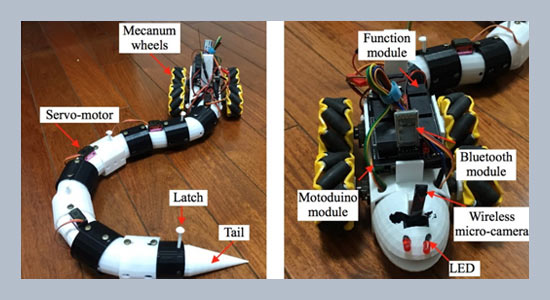
For the purposes of field explorations and rescues, this research designed and implemented a simple snake-like robot that can move in narrow space and various terrains. The frame of the robot was constructed by modular segments. Each segment consisted interlocked rings, connecting rods and servo-motors that enabled the robot to bend and oscillate the body and imitate the 2-D gaits of snakes. We used Motoduino module, Bluetooth, servo-motors and wireless micro-camera to activate the robot. In order to cut down the cost, the robot’s skeleton and mechanical components were designed by 3-D printing using PLA material. The weight of the robot is about 960g and the size is 79cm×14cm×9cm. The maximum speed and the radius of gyration are about 16cm/sec and 21cm, respectively.ABSTRACT
Keywords:
Biomimetic robot, Modular robot, Snake robot, and Motoduino.
Share this article with your colleagues
REFERENCES
ARTICLE INFORMATION
Received:
2020-12-12
Revised:
2021-04-06
Accepted:
2021-04-12
Available Online:
2021-09-01
Liao, L.-C., Luo, J.-R. 2021. Design and implementation of a snake-like robot with biomimetic 2-D gaits, International Journal of Applied Science and Engineering. 18, 2020331. https://doi.org/10.6703/IJASE.202109_18(5).001
Cite this article:
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.