David Kumar1*, Swapnil Shandilya2 1 Department of Aerospace Engineering, Indian Institute of Technology Kanpur, India; Department of Aeronautical Engineering and Center for Non-Destructive Testing, Chaoyang University of Technology, Taichung, Taiwan, R.O.C.
2 Department of Mechanical Engineering, Indian Institute of Information Technology, Design and Manufacturing, Jabalpur, India
Download Citation:
|
Download PDF
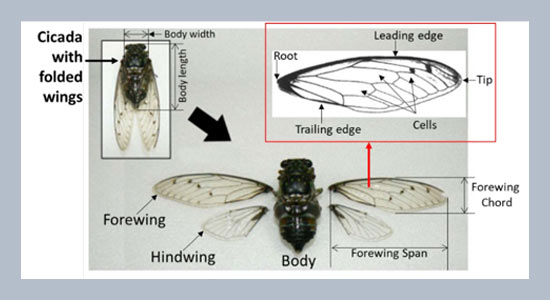
A bioinspired tethered MAV model is designed, constructed and studied for structural dynamic characteristics using novel materials and methods. The model consists of two flapping wings, a compliant flapping mechanism, and a supporting chassis. Large size insects such as dragonfly and cicada are considered as inspiration for the designing purposes. The wings and mechanism designed in this study are a simplified form of the natural counterparts. These idealized bioinspired structures are first studied for structural dynamic characteristics using finite element methods. Carbon nanotubes/polypropylene (CNTs/PP) nanocomposite stiffeners and a thin LDPE membrane are used to realize the designed wing model. The use of this novel material composition resulted in a lightweight, thin, and flexible wing capable of large amplitude passive bending-twisting motion. For constructing the flapping mechanism, a novel compliant mechanism is fabricated and attached with a piezoelectric actuator of cantilever form. The compliant mechanism is designed with CNTs/PP nanocomposite flexure joints supported using rigid carbon fiber/epoxy composite linkages. The fabrication of wing stiffeners and mechanism flexures from lab developed CNTs/PP nanocomposite materials is carried out using laser micromachining based manufacturing technique. The complete MAV model is constructed by assembling the wings and mechanism with a carbon fiber/epoxy composite chassis. The final assemblage is a two-winged MAV model of a total mass, body length, and wingspan of 0.6 1g, 60.46 mm, and 90.14 mm, respectively. An external customized power supply is developed and used with a microcontroller to actuate the flapping mechanism and wings during experiments. The computational structural analysis showed that no resonance occurs at the mechanism, all the first four fundamental modes are at the wings. This is advantageous for accurate and efficient motion transmission to the wings. The model generates large-amplitude wing deflections with a very small amplitude input excitation from the actuator - useful for higher aerodynamic performance. Experimentally, the structural dynamic analysis of the MAV model is carried out using an in-house high-speed 3D digital image correlation (DIC) technique, which reveals that the wings generate bending dominated deforming shape with marginal twisting and positive camber (during downstroke). Structural dynamic results from computations are in good agreement with the experiments that validates both of the approaches for further advancements in the developed MAV model. Overall outcome of the current work is a simplified biomimetic MAV design, a potential candidate for developing mechanically efficient MAV models.ABSTRACT
Keywords:
MAVs, Flapping wings, Biomimicking, Nanocomposites, Flexure joints, Insects.
Share this article with your colleagues
REFERENCES
ARTICLE INFORMATION
Received:
2020-11-20
Accepted:
2020-12-31
Available Online:
2021-06-01
Kumar, D., Shandilya, S. 2021. A bioinspired MAV with nanocomposite wings and flexure joints: design and structural dynamic analysis, International Journal of Applied Science and Engineering, 18, 2020299. https://doi.org/10.6703/IJASE.202106_18(2).001
Cite this article:
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.